ATI 资深力控专家苏哲 | 六维力和力矩传感

目前,六维力和力矩传感器在机器人、航空航天、生物医学等领域得到了广泛应用,特别是在机器人领域,其在实现智能机器人“触觉”、“力觉”和“听觉”中起着关键的作用。
作为测量机器人末端操作器和外部环境相互接触或抓取工件时所承受力和力矩的传感器,六维力和力矩传感器为机器人的力控制和运动控制提供了力感信息,对实现机器人智能化起着重要作用。
ATI资深力控专家、FT应用工程师苏哲先生,分享了六维力和力矩传感器的技术与应用的相关问题。

苏哲先生硕士毕业于田纳西大学生物医疗系,是ATI的资深力控专家,FT应用工程师。
本期分享要点如下
1.六维力和力矩传感器
2.ATI的六维力和力矩传感器
3.六维力和力矩传感器的选型及测试
4.应用范例
以下内容根据苏哲先生直播分享实录整理
01、六维力和力矩传感器
1、什么是六维力和力矩传感器?
在介绍六维力和力矩传感器之前,先了解一下什么是力传感器?
力传感器是将力的量值转换为相关电信号的器件。根据所测力的维数不同,力传感器可被分为单轴力传感器和多轴力传感器。
单轴力传感器指测量单一维数方向上的力或力矩,同理多轴力传感器就是可以检测多个维数方向上的力或力矩。图中,左边两个为单轴力传感器,右边两个为多轴力传感器。

图一 力传感器
六维力和力矩传感器指的是一种能够在笛卡尔坐标系中同时测量力和力矩并且可以各三个分量的转换成为电信号的器件。

图二 六维力和力矩传感器定义图
2、六维力和力矩传感器工作原理
六维力和力矩传感器的工作原理主要考虑感力原件和理论模型两方面:
感力原件
根据感力原件的不同,传感器主要分为三类:应变式力传感器、光学式传感器以及压电式力传感器。
应变式力传感器,采用的是硅应变片或金属箔,本质是材料本身发生形变进而转化为阻值变化;
光学式传感器则是通过光栅反映形变,再转化成力;
压电式传感器是将被测物理量变化转换成压电材料因受机械力产生静电电荷或电压变化的传感器,可分为电容和压电两种,电容是通过极距的变化导致电压变化,压电则是通过形变改变电荷。
3、不同原理六维力和力矩传感器比较
经过稳定性、刚度、动态特性、成本与信噪比五个维度的比较可知,硅应变传感器和金属箔传感器之间,硅应变片在稳定性、信噪比以及动态特性方面要更优,两者刚度上相差不多,但成本上金属箔要优于硅应变片;电容传感器和压电传感器之间,电容传感器成本最优,其他几项弱于压电传感器;光学传感器在动态特性方便明显具有优势。

图三 六维力和力矩传感器比较
4、应用领域
六维力和力矩传感器的应用领域主要有以下方面:

图四 六维力和力矩传感器应用领域
02、ATI六维力和力矩传感器
ATI是世界领先的机器人附属产品和机械手臂末端工具的工程研发公司,其研发的六维力和力矩传感器具有很大的负载覆盖范围、较多的通讯方式选择、极高性能的低成本传感器、较复杂的应用场景、更多人信赖的品牌等特点。
1、负载范围
ATI六维力和力矩传感器最大量程88000N和6000Nm,最小的达到12N和50Nmm,均匀的覆盖了所有的负载范围,此外还有各种类型,例如设置通孔便于安装、采用钛合金材质、机身可以防尘防水、自定制等等

图五 ATI六维力和力矩传感器种类
2、通讯方式
ATI六维力和力矩传感器支持多种通讯方式例如:UDP(User Datagram Protocol)、TCP/IP,RS485等等,三种传感器控制系统,三种类型传感器适配多种品牌。

图六 ATI六维力和力矩传感器通讯
ATI六维力和力矩传感器系统有NET、DAQ、CON三种,分别是基于以太网的传感器控制系统、基于数据采集装置的传感器控制系统、基于CON总线的传感器控制系统。
* NET F/T 系统(F/T指力/力矩)
1)包含传感器本体和Net BOX,配到线缆及电源。
2)对于Gamma及以上校准信息包含在传感器中,其余型号在Net Box中。
3)支持EtherNet/ IP,CAN BUS。
4)兼容DeviceNetTM,提供PROFINET作为选项。
5)单个传感器可配备多个量程,同样一个传感器可以切换不同的量程,满足不同的应用场合。
* DAQ F/T系统
1)包含传感器本体,供电盒(或加放大器),数据采集卡和数据电缆四大部分。
2)传感器实时感知负载变化,并将变化的负载转化成变化的电压信号输出
3)供电盒一方面将输入传感器的电压调成标准的5V或10V恒流电压,一方面将传感器输出的电压信号进行滤波和信号放大。
4)数据采集卡提供PCI,PCMCIA,CPCI和USB等接口形式供用户选择,主要实现高速数据采集和A/D转换功能。
* CON F/T系统
1)具备单独的数据采集控制器。
2)输出接口RS232和模拟量接口。

图七 ATI六维力和力矩传感器控制系统
ATI六维力和力矩传感器包含OEM传感器、Ether CAT、无线传感器三种类型传感器。
* OEM传感器
1)对于小型传感器放大及运算电路无法封装在传感器)本体中。
2)传感器OEM(及部分Gamma传感器)。系统包含传感器本体,OEM电路板和电缆三大部分。
3)支持ECAT,CAN,RS485等信号。
* Ether CAT传感器
1)Ether CAT传感器符合Beck hoff标准。
2)自带IP64、IP65或IP68防护,取决于传感器本体型号和定制需求。
3)可外接电源供电或支持PoE供电。
* 无线传感器
1)支持Nano,Mini系列传感器。
2)包括传感器本体,无线通讯,运放盒子。
3)同一机身支持最多六个传感器同时工作。
4)每个传感器可配两个量程。

图八 ATI三种类型传感器
3、高性能和低成本
ATI Axia80是一款高性能、低成本的六轴力和力矩传感器,拥有极高的分辨率、精度和刚度,可以提供触觉感知。整个放大电路整合入传感器内部,从而降低成本、节约空间并极大提高稳定性。可用于Ethernet、Ether CAT或串行通讯方式,并具有高信噪比和高过载保护功能。
4、应用场景
ATI六维力和力矩传感器在电子行业、汽车工业、机器人、飞行器以及仿生等领域得到了广泛的应用,深受苹果、福特等公司的青睐。

图九 ATI传感器应用领域
03、六维力和力矩传感器选型及测试
1、六维力和力矩传感器选型
* 传感器选型难点
六维力和力矩传感器是一个相对“脆弱”的传感器,其选型与应用场景有很大的关联性,所以不同选型的难点在于应用多样性、复杂性。
☑由于传感器量程和精度成反比关系,怎样选择合适量程的传感器才能使精度达到最大?
☑在复杂应用场景下,传感器本体除精度外是否能适应应 用场景?
☑在精密机构当中的传感器如何安装在狭小空间内,如何与机构融为一体?
* 选型要点
在千变万化的应用环境中,选择合适的传感器至关重要,可被归纳为四个核心步骤:
1)确定量程需求
负载包括外部负载和加速度负载。P = Pa + Pe
☑力的估算
力的负载包括法兰、工具夹爪、外力(如打磨力,装配力)再用直接投影法或者二次投影法
计算Fx Fy Fz。
☑力矩估算
M = Ma + Me
Me = r ×Fe
2)确定使用环境
选择传感器时,不同的环境需要考虑不同的防护,例如在实验环境下,主要考虑的是室温、无粉尘、液体,选择传感器时选择普通传感器即可;
在工业现场环境下,这个时候会出现粉尘、磨削液、高温等场景,需根据需求选择不同IP防护;
在室外环境下,考虑的是风吹日晒雨淋;在水下应用中,是否是非纯净水以及水下作业时间长短;在航空航天,需要考虑超低温、真空等环境影响因素。
3)确定机械出线需求
不同安装环境需要考虑不同出线方式,ATI提供了多种出线方式选择。
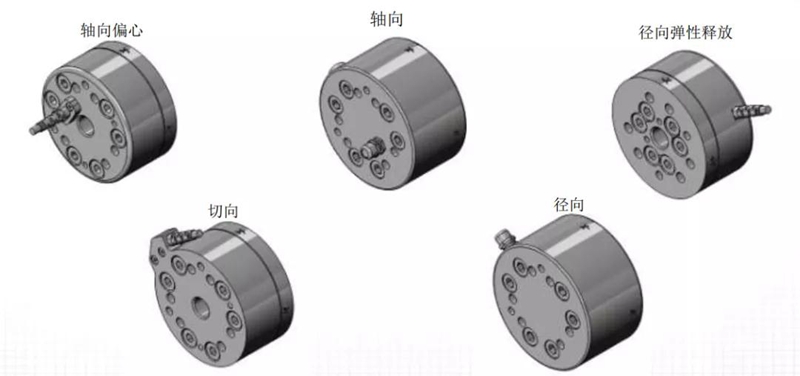
图十 不同出线方式
4)确定通讯方式以及配套软件
常见上位机包括PC,机器人,PLC等,力和力矩数据被用作数据采集源和运动控制。

图十一 通讯方式
2、六维力和力矩传感器启动测试及数据采集
* 传感器安装
其中过渡板设计以及安装注意事项包括:所有负载必须只连接在传感器测试面上;过渡板必须包含螺纹孔、定位销、主定位销、如是机器人应用最好与机器人六轴坐标系方向重合;过渡板需要有足够厚度、强度、刚度,保证刚性连接;安装螺栓需略短于安装孔深度,避免影响内部结构;如机器人安装孔与传感器安装孔重合,可设计双法兰;传感器线缆应避免反复弯折,过度扭曲,以保证信号质量。

图十二 传感器安装
* 传感器启动测试及数据采集
ATI为各种通讯模式的传感器提供开源的上位机采集与测试软件,其核心功能为:用户可对传感器进行测试、可采集传感器数据。同时ATI也对开发者提供不同版本的库,也有协作机器人与免费的通讯软件。例如:C Library,C++,Java等,在GitHub上有许多开源代码供开发者使用。
04、应用范例
* 示例一搅拌摩擦焊

图十三 示例一
* 示例二机器人整臂力控

图十四 示例二
* 示例三机器人打磨

图十五 示例三
* 示例四机器人装配

图十六 示例四
* 示例五产品测试应用

图十七 示例五
* 示例六精密装配应用

图十八 示例六
ATI自动化公司
自1989年起,ATI开始致力于优质高效的机器人末端执行工具的研发制造,拥有150多名研发人员,近30年的经验积累。产品包括机器人工具快换装置,多轴力/力矩传感器,机器人毛刺清理工具,机器人碰撞传感器,顺从介质连接器和远程中心顺从装置。是FANUC、KUKA、ABB、安川等机器人的合作伙伴;是NAVECO、长城、长安、吉利、通用、福特、戴姆勒、本田、丰田、日产、雷诺等汽车厂的工具快换装置的全球供应商。

时间:2020-05-27 23:46 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
- [机器人]独家对话ATI亚洲区总经理白伟先生:保持技术领
- [机器人]独家对话 Franka Emika 刘恩德总经理:专注力控技术
- [机器人]上火星 | ATI太空级力/力矩传感器搭载“毅
- [机器人]技术干货丨iGrinder力控打磨系列案例之五:马桶泥
- [机器人]教学案例|毕业设计之工业机器人力控装
- [机器人]外科医生意想不到的机器人“触觉
- [机器人]技术干货丨iGrinder力控打磨系列案例之三:力、位
- [机器人]高效物流 | R2000激光雷达“实力控场”
- [机器人]Automation Anywhere融资2.9亿美元,估值68亿美元
- [机器人]2019机器人打磨抛光论坛 | ATI演
相关推荐:
网友评论: