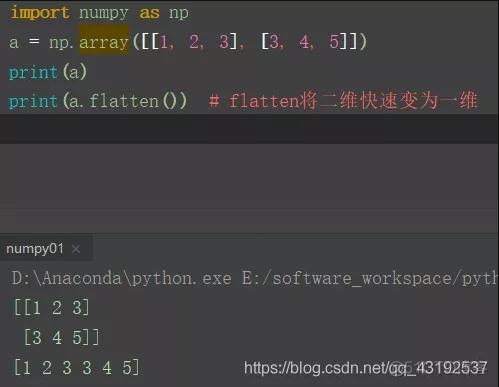
拾取放置机器人系统RightPick 2使用RealSense计算机视
在劳动力挑战和电子商务订单的加速需求,以及疫情期间的社会疏离,对自动拣选和分类成千上万个物品的需求比以往任何时候都更为迫切。但是,英特尔公司表示,传统的工业机器人不够灵活,部署起来也不容易。RightHandRobotics 的RightPick2是使用计算机视觉结合机器人硬件和软件的解决方案的一个示例。

RightPick2使用RealSense D415摄像机进行区分和计划运动轨迹。资料来源:英特尔公司
英特尔称,随着电子商务以每年15%到20%的速度增长并且在疫情期间增长更快,仓库对单项拣货的需求日益增长。位于马萨诸塞州萨默维尔的RightHand Robotics补充说,有些设施已经转向半自动搬运箱,分批拣选和拣选墙,但是这样的系统可能无法减少人的接触或进行复杂的垃圾箱拣选。
RightHand产品与营销负责人Vince Martinelli说:“一个电子商务仓储物流中心可能有100,000至100万种不同的产品,在这里使用传统的机器人技术真的很困难。” “工业机器人通常具有非常结构化的环境,并且要处理的产品数量非常有限。在电子商务环境中,杂物混杂在混合产品的垃圾箱中,它们一直在变化。这需要一种新的技术。”
RightPick2使用RealSense D415实现计算机视觉
英特尔实感产品管理和营销负责人Joel Hagberg表示,计算机视觉已发展为可以帮助机器人应对取件,分割和包装挑战。
他说道:“传统的机器人解决方案难以处理多个不同的对象,并且通常在可识别和拾取的对象的数量,形状或类型上受到限制。” “虽然机器学习可以帮助训练系统可靠地拾取单个项目,但需要的是一种无需训练即可拾取任何未知项目的方法。”
RightHand Robotics表示,它设计研发了RightPick2,应用于自动化杂货店、药房、零售店等更多的电子商务实现阶段。英特尔表示,其RealSense深度摄像头可提供数据,使机器人能够从混合垃圾箱中挑选单个物品,并通过避免碰撞来挑选损坏的物品。
“我们称之为系统的手/眼协调功能,” Martinelli说。“我们使用英特尔实感D415深度摄像头作为主要视觉系统。这对于细分和运动计划的各个方面至关重要。”
强大的数据是可靠拣选的关键
RightHand从数百万个库中收集了数据,以学习处理不同形状和类别的物品的最佳方法,以及对它们进行定向以进行有效分类和提升的最佳方法。英特尔声称,RealSense D415是其D400系列的一部分,其视场可以为小物体或需要精确测量的情况(例如在分拣箱中)提供更高的深度分辨率。
“在RightPick2中使用的英特尔实感深度摄像头D415是带有集成RGB摄像头的立体声深度摄像头,” Hagberg解释说。“摄像机在2m或更短距离内的z误差(也称为深度误差)小于2%。深度像素尺寸为1.4μm×1.4μm。高分辨率与低误差的结合有助于为任何客户应用生成准确的深度图像。”
他说:“由于震动或振动导致两个成像器之间的校准丢失,立体声深度相机会随着时间的流逝而失去准确性。” “通过在SDK [软件开发人员工具包]中引入我们的新自校准功能,开发人员可以在0.6秒钟内对现场的传感器进行测试和重新校准。该功能还可以自动运行,从而为我们的客户确保更可靠的数据流。”
哈格伯格说:“英特尔实感深度摄像头D415包含集成的D4视觉处理器。” “该视觉处理器直接在设备上执行所有深度计算。该处理器专门针对深度计算进行了优化,使其速度极快。这样就产生了一种低功耗解决方案,非常适合任何自主机器人,而无需额外的处理能力。”
英特尔指出,D415的紧凑设计和性价比使RightHand Robotics可以使用多个摄像头来收集可靠的数据。
哈格伯格说:“使用多台摄像机有助于从多个角度观看物品,从而产生对物体的准确理解。” “更精确的对象理解可以在各种情况下进行可靠的拾取。”
英特尔使开发人员易于集成
Hagberg说:“英特尔实感提供了多种使集成变得容易的选项。” “对于希望快速对机器人进行原型设计和测试的开发人员,可以将自包含的即插即用深度相机直接安装在机器人原型上。”
他补充说:“对于那些寻求最大效率的人,我们还提供了可以内置到大批量产品中的模块,并提供了最佳的价格和性能。” “跨整个设备系列的一个易于使用的SDK使开发人员可以专注于自己的解决方案。”
“ SDK是开源的,并且具有对Windows,Android和Linux以及Raspberry Pi等其他流行平台的跨平台支持,并且[它]支持使用ROS,C / C ++,Python等进行开发。”哈格伯格说。“这使开发人员可以灵活地使用Intel RealSense摄像机进行工作,并可以快速使用大量的代码示例库,使用方法文章以及有用的软件(如Intel RealSense Viewer和调试工具)快速入门。”
他说:“一个得到良好支持的开源平台的优势是,开发人员拥有对不断完善的代码库的完全访问权限,以及可以根据自己的需求对其进行修改的灵活性。” “不断增长的代码示例库将通过针对机器人开发人员的一些最关键的应用程序(例如避免碰撞,占用映射和路径规划)来帮助使任何项目快速启动并运行。”
“通过在整个英特尔实感产品组合中使用相同的SDK,为一台摄像机开发的任何应用程序都可以在将来的任何摄像机上使用,而对应用程序代码的更改却很少。只需开发一次,即可利用各种现有和将来的设备,而无需为不同的设备分叉或开发不同的分支。”

资料来源:英特尔公司
RightHand说,它的RightPick2最适合用于装箱,将单独的物品包装成一个单元,以及用于分拣机归纳和货物拣选服务。它说,机器人系统可以对从自动存储和检索系统(ASRS)出来的批量拣选的物品进行分类,并促进订单质量的保证。能完成自动拣选转变的关键是计算机视觉。

时间:2020-07-31 11:48 来源: 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论: