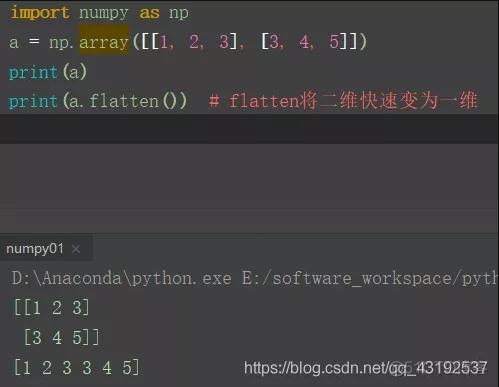
机器人码垛程序编写与调试
在安装保密人员之前,首先检查设备是否丢失,并检查机器人的眼睛状况是否良好。然后安装控制柜并用叉车或起重机提升机器人本体。最后将机器人外壳连接到控制柜。机器人与控制柜之间的连接主要是电机电源电缆、速度计数电缆和用户电缆的速度状态。机器人码垛程序编写与调试?

设置语言
首次打开机器时,默认语言为英语。你需要切换到中文,方便使用。
1.单击左上角的“ABB”标志
2单击“ControlPane!”
3.单击“语言”
4.选择“中国”并单击“确定”*
5.选择“是”等待机器人重新启动,语言设备将完成示教器的主界面
备份和恢复
为了确保机器人的正常运行,定期备份是一个好习惯。备份文件可以放在机器人的内部存储器中,也可以备份到USB闪存驱动器中。
备份文件包含操作过程和系统配置参数。如果发生严重的系统故障,您可以通过备份文件快速恢复备份前的状态。通常,在更改程序之前进行备份。应注意,备份和恢复数据是唯一的,一个机器人的备份数据无法恢复到另一个机器人。
标定
ABB机器人的每个连接轴都有一个机械原点。在以下情况下,计数器应更新机械原点的位置:
1.升级同一服务器的电机扭矩电池
2.如果转数计数器失效,
3.从测量板上断开计数器后
4.打开后,机器人的关节轴移动
系统警报表示10036个计数器未正式打开
系统IO配置和接线
机器人信号输入部分的原理,包括704位24位V+、703位24V-输入信号从夹爪、夹爪末端、压板末端、袋抓取室准备就绪、托盘准备就绪-5开始。前三个是气缸磁性开关检测信号,后两个是支持PLC传输到机器人袋和托盘准备就绪的信号。为了实现电气绝缘,网络PLC必须将机器人电平信号转换为机器人自己的电平。输出部分的原理如下:它还具有五个输出,即抓取电磁阀、压袋电磁阀、抓取停止信号、堆叠停止信号和机器人工作信号。通常DSQC652给我们一个通信接口,每个接口对应一个输入或输出。这是一个DSQC652通信板。上端子和下端子包含16个数字输入和16个数字输出。每个接口对应一个地址。例如,X1.1对应于数字输出0号地址(o0),X1.使用数字输出1号地址(do1),X3.1对应于数字输入0号地址。每个接线板9连接到线路703(COM),10连接到线路704(+24V)。
机器人码垛程序编写与调试?首先,我们需要为机器人控制系统中的五个输入信号和五个输出信号配置机器人程序中使用的唯一名称,例如爪diOJiaZhuaStart的起始位置和爪di1JiaZhuaEnd的结束位置。该程序无法识别汉字,因此这些信号也必须是字母和数字的组合。然后用黑板上的物理地址交叉引用这些名字。
(机器人在线)

时间:2022-12-15 22:59 来源:未知 转发量:次
声明:本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,不为其版权负责。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。
相关文章:
相关推荐:
网友评论: